Los sistemas EFI modernos ofrecen constantemente nuevas funciones avanzadas para mejorar el rendimiento de nuestros vehículos, y es más fácil que nunca ir más rápido con seguridad. Una tecnología crucial si tienes un coche potente y no quieres terminar con problemas como nuestro Toyota 86 de la foto es el control de tracción.
El control de tracción funciona monitorizando la velocidad de las ruedas motrices y no motrices. Cuando el coche empieza a patinar, la velocidad de la rueda motriz será mayor que la de la rueda no motriz, y la ECU puede analizar la diferencia y calcular el porcentaje de deslizamiento. Contrariamente a lo que se suele pensar, si se busca la máxima aceleración, es deseable un pequeño deslizamiento, y la aceleración máxima se consigue con un deslizamiento de alrededor del 10 %.
Una forma común de implementar el control de tracción es que la ECU establezca un porcentaje de deslizamiento determinado y luego utilice un algoritmo de control PID para ajustar el retardo de encendido, el corte de encendido, la posición del acelerador o, a veces, los tres para alcanzar el objetivo. Esto puede ser extremadamente efectivo si se ajusta correctamente; sin embargo, perfeccionar la estrategia de control requiere mucho tiempo. Una función que todos los fabricantes de ECU han dedicado mucho tiempo a optimizar es un límite de revoluciones efectivo. Veamos cómo el Motec M1 implementa un límite de revoluciones para controlar el deslizamiento de las ruedas.
Si la ECU conoce la velocidad de la rueda no motriz, así como la relación de transmisión, la relación de transmisión final y el diámetro de rodadura de las ruedas, puede calcular las rpm teóricas del motor para alcanzar una velocidad determinada. Estas serían las rpm del motor sin que las ruedas patinen. Una vez que la ECU conoce las rpm, puede introducir un límite de revoluciones del motor ligeramente por encima de este nivel que alcance el nivel de deslizamiento deseado. Por ejemplo, supongamos que las rpm de "deslizamiento cero" son 4000. Si en este punto se establece el límite de revoluciones de tracción en 4400 rpm, se permitirá un deslizamiento del 10 %.

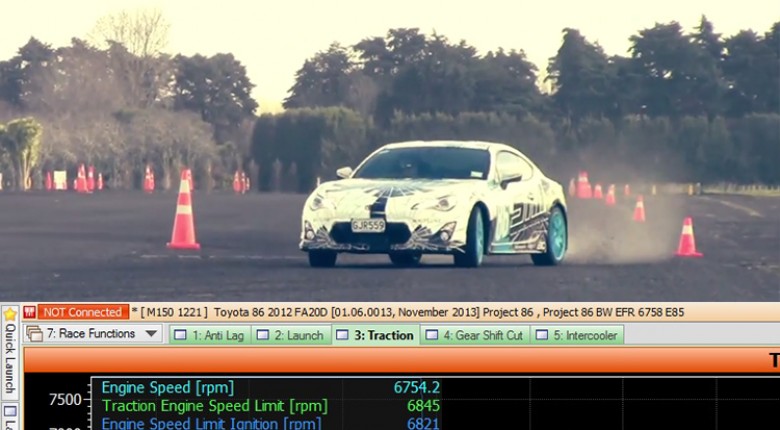
El registro de datos muestra la aceleración en segunda marcha en nuestro Toyota 86 turboalimentado de prueba sobre carretera mojada. Normalmente, esto provocaría un giro descontrolado de las ruedas y muy poca aceleración. En el registro de datos, la línea azul claro representa las rpm reales del motor, mientras que la línea azul oscuro representa el límite de revoluciones del control de tracción. Se puede observar que, al acelerar a fondo, las rpm del motor suben constantemente hasta el límite del control de tracción, pero nunca lo superan. La línea verde muestra que el acelerador está completamente abierto durante toda la prueba.
El último grupo del registro muestra el corte de encendido aplicado por la ECU MoTeC M1 . Cada vez que se corta el encendido para reducir la potencia del motor, el conteo de cortes de encendido aumenta.
Estamos a punto de comenzar a grabar nuestro nuevo curso de "Funciones Avanzadas", que detallará el funcionamiento de funciones como el control de tracción, el control de lanzamiento, el antilag y el control de cambios. La versión inicial también incluirá ejemplos prácticos en la plataforma Motec M1 para ofrecer un enfoque paso a paso que explica el funcionamiento de cada función, su configuración y, finalmente, su ajuste correcto.
Si este es su caso, únase a HPA como miembro Bronce (es gratis) y le informaremos cuando el nuevo curso esté listo.






