Sale ends todayGet 30% off any course (excluding packages)
Ends in --- --- ---
I'm working with a customer using a TTi 6-sp sequential gearbox in a Mazda MX-5. We have added paddle shifting using his MoTeC M130, and the MoTeC USA Sportscar Firmware (similar setup to MoTeC GPRP).
I'm struggling figuring out what this gearbox wants. On a Power On Upshift, I am activating the actuator (preload 20ms), seeing the barrel start to move, the Gear Shift Speed Limit goes active and but the engine revs don't drop -- it's like the dogs are still engaged in the current gear. I've also reversed this with Pre-Shift that does the torque cut before the actuator goes active. Again, I can't seem to get out of gear so the RPMs can drop to let the next gear engage. This gearbox is not behaving like the Hewland or Sadev boxes I've used before.
Does this gearbox have a lot of "drag" between gears? We tried upping the actuator air pressure, but that didn't seem to help. We might change the position of the actuator on the Gearbox shift arm, to provide more leverage / force. Is that what it needs?
I am not with the gearbox, so can only rely on the logged data and what my customer tells me.
I know Simon mentioned several years ago using a TTi gearbox in their Z-car. Did you ever implement paddle shift on that car?
Anybody else have experience with one of these?
David,
I've not used that particular box, but I'll try to help. If the actuator isn't installed in a manner that it has sufficient leverage that's likely part of the issue, but since you said revs aren't dropping, I have additional questions.
When you say the barrel starts to move, do you mean first deviation from current gear position or after it has moved a bit and the gear is fully preloaded? I suggest trying your torque reversal as full preload is achieved rather than when the barrel starts to move and see if behavior changes.
Can you provide an example current and next gear voltage, then what voltage you're seeing during preload?
How long is the actuator taking to go from signal to full preload?
I trust you've tried different amounts of cut and retard. What have you tried?
Does the vehicle have a heavy/high inertia clutch/flywheel?
How much air pressure are you running?
If the vehicle has a shifter, can you hold preload with that to see if barrel position voltage is similar to what the actuator is achieving?
I am not familiar with the gearbox, but it may have a steeper 'back cut' on the dogs to prevent them slipping out of gear under torque reversals and inertial loads and/or stronger detent springs.
You say you're activating the shift after the cut, the engine drag may be enough to hold the dogs engaged, with the above, against the shifting mechanism.
It may help if you activate the shift slightly before the cut, so the shift mechanism can pull it from engagement during the neutrl period between the positive and negative torques?
Again, not my thing, but it reads like you're using a gear-lever load cell for all the timing initiation - might be an idea to check the resolution of the gear position sensor/sender and using that for your timing - by that I mean there is movement at the gear position and that's the ignition cut, and when the gear is engaged the ignition is re-enabled.
Hi David,
I dont have any paddle specific experience with the TTI, but I do know the gearbox well and have set up quite a few for lever shift.
Your comment that the revs dont drop when the shift speed limit activates doesnt sound right, even if a gear doesnt disengage I would expect to see a fairly obvious interruption to engine acceleration. Does the gear shift RPM target look correct when the speed limit is active? Does cut average and cut count look like there is actually a limiter working?
In terms of the gearbox itself there is nothing too extraordinary with it, not especially difficult to disengage. I would say the leverage ratio of the shift drum mechanism is higher than typical, they do generally have quite a long shift lever fitted. The dog backcut is pretty standard issue looking, 6 or 7deg I would say and there are only 4 dogs on most gears.
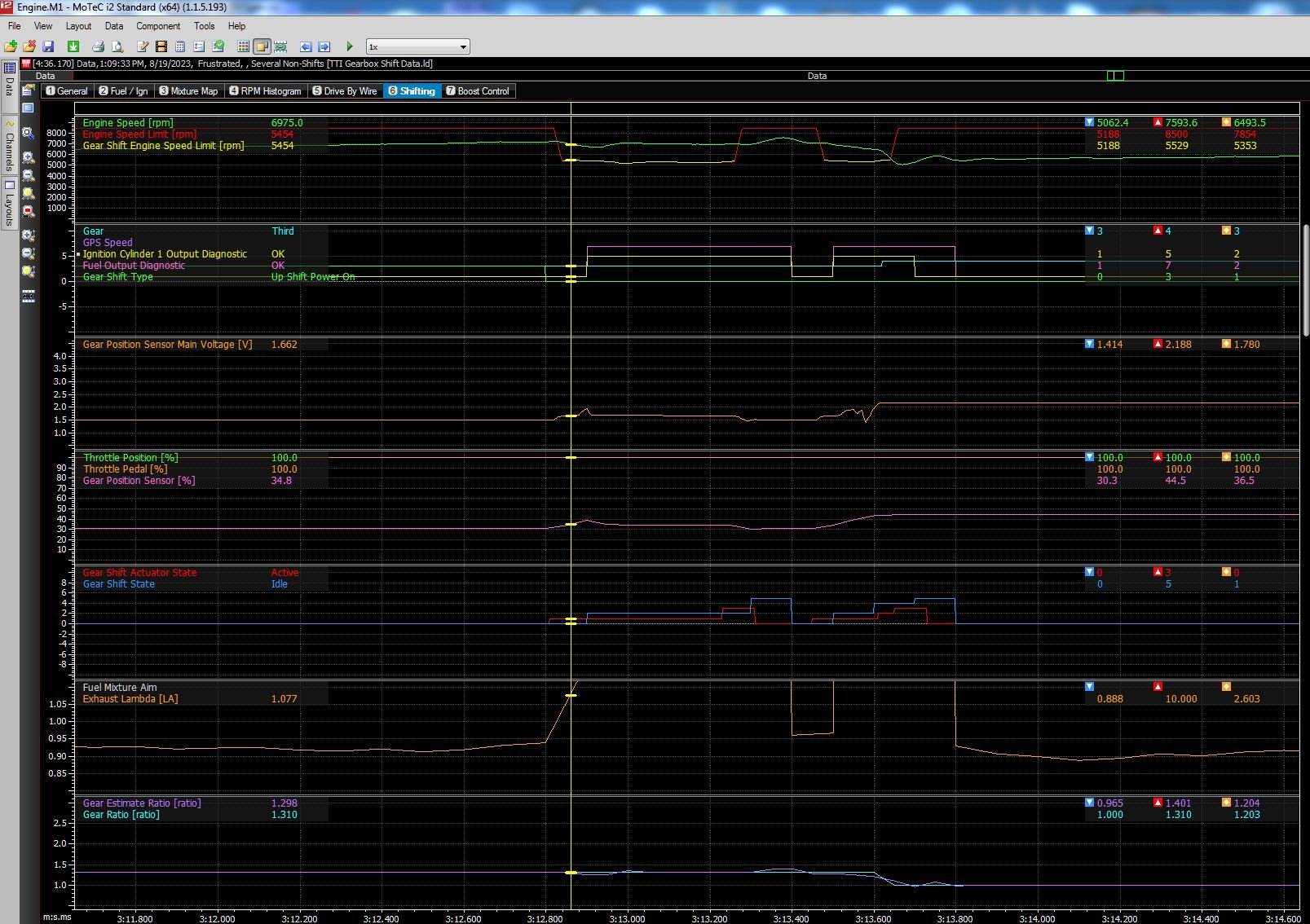
Here is a logged data file you can open in I2 Standard. And a picture showing a failed shift and a retry that worked.
Mike McGinnis,
When you say the barrel starts to move, do you mean first deviation from current gear position or after it has moved a bit and the gear is fully preloaded? I suggest trying your torque reversal as full preload is achieved rather than when the barrel starts to move and see if behavior changes.
In the data file above, at 192.857s, you can see the barrel has moved and stopped, but then as the cut takes place, it moves a bit more, but then returns to essentially the same place / voltage.
Can you provide an example current and next gear voltage, then what voltage you're seeing during preload?
I've provided a data file. In the example at 192.857s, current gear voltage is 1.512, preloaded amount is 1.660, and next gear is 2.171
How long is the actuator taking to go from signal to full preload?
This is tough to say, Actuator State can only be logged at 100 hz (10 ms resolution), but in 20ms it's at the pre-load voltage.
I trust you've tried different amounts of cut and retard. What have you tried?
I am only using Gear Shift Engine Speed Limit, but this cuts both fuel and ignition 100% since we are several hundred RPM over the target at the beginning of the shift.
Does the vehicle have a heavy/high inertia clutch/flywheel?
Not wure, but I don't think this is the problem.
How much air pressure are you running?
I think this data file was targeting 120, in the data file, the pressure ranged from 113 to 131 psi in the entire file.
If the vehicle has a shifter, can you hold preload with that to see if barrel position voltage is similar to what the actuator is achieving?
There is no manual shifter in the car, just the paddle shift actuator. It does have the manual "reverse" lever found on the TTi gearboxes
Adam,
Does the gear shift RPM target look correct when the speed limit is active? Does cut average and cut count look like there is actually a limiter working?
Yes, they do. Some of the state / diagnostic channels can't be logged faster, but I need to try and up some of that. I'm confident the engine is in full cut, but it's speed is being held up by the gearbox. Note the Gear Ratio Estimate tracking the actual gear ratio of the current gear (except for the one gear where the calculate does not confirm what is supposed to be in the box!)
In terms of the gearbox itself there is nothing too extraordinary with it, not especially difficult to disengage. I would say the leverage ratio of the shift drum mechanism is higher than typical, they do generally have quite a long shift lever fitted. The dog backcut is pretty standard issue looking, 6 or 7deg I would say and there are only 4 dogs on most gears.
I saw the extra long lever, and wondered if it was all about a required force ratio. I watched the video of they demonstrating shifting found here:
https://www.ttindustries.com/car-gearboxes/
Thank you all for providing feedback and asking questions I need to consider.
Hi David,
Is this mostly shifting into/from third? I think that the the Gear Position Sensor value for Third is incorrect, the channel Gear Shift Position Error is reporting -13.8% in third, but the other gears are within +/- 0.5% of 0.
I think the Gear Shift Position Error is showing that we aren't getting to the Next Gear. When it actually makes it into Third, the Gear Shift Position Error is less than +/-0.5% as well.
Yeah now I've seen the log, Im leaning towards a lack of actuator force being the main issue. I cant remember if the Motec gear shift lockouts are flexible enough to allow a shift without the engine running, but assuming they are, then a static shift test without the engine running is a good basic test to confirm the mechanical factors are adequate. Its not a foolproof test, but a good validation that you at least have the bare minimum requirement. To do a this test you rock the car around so its resting in a position where 2 or 3 gears can be engaged without a dog clash. Then with the accumulator at full pressure, log a couple of shifts up and down at a fast logging rate. You should see shift times less than about 45ms if the mechanical system is adequate in my experience. Some documentation I have says you should be less than 30ms but most cars I have tested seem to come in around 40ms. For reference since different ecu's have different definitions of "shift time", the time Im stating here is measured from the moment the actuator output goes active until the gear pos voltage reaches your "next gear margin" or whatever you call it.
**I just edited this post as the last couple of sentences had been cut off for some reason. I think this forum software doesnt like the "less than" symbol used.
The standard GPRP Firmware allows for this to be done, I'm not sure what MoTeC USA did to the Paddleshift system when they wrote the Firmware that David is using.
Yes, we can attempt shifts without the engine running. The car owner didn't want to do much of that based on advice from TTi to always have the gearbox turning, but rocking the car to find a spot that will shift is certainly doable, and I will suggest this, and capture a log. His is going to give the actuator more leverage to move the barrel.
The MoTeC USA Sportcar firmware seems to add an "active return", adds the "gear position lookup" table for normalized sensor values, and support for half-shifts for gearboxes with a half-shift required for neutral. We aren't using any of that (except the lookup that is required).
I would be keen to see some pics of the gearbox install if you're able to share!








