Sale ends todayGet 30% off any course (excluding packages)
Ends in --- --- ---
Hi everyone,
just to be shure, is the reason why we use corrected speed, so that we don´t have an error in our speed channel due to the difference in rotational speeds of, for excample, the front tires during cornering? So in short, does the corrected speed produce like an average speed out of both front tires or one front tire and GPS?
Thanks in advance,
Michael
Could you please give some context or, preferably, a link to the specific instance it's being used?
MoTeC's corrected speed helps to compensate for the case where the front wheelspeeds are slower than expected under braking as well as wheel slip under hard acceleration exiting a corner. It does this by using the longitudinal acceleration from a G-sensor with the calculated acceleration from wheel speed sensors.
Now the difference between inner & outer is usually handled with the device recording the individual wheelspeeds (ECU or Dash in MoTeC's case). Often you want to use either the fastest of two undriven wheels (compensates for a wheel lockup), or the slowest of the driven wheels (compensates for wheelspin of the inside wheel).
Hopefully that helps. More information can be found in the online Help of MoTeC products when you configure the driven and undriven speeds.
BTW -- GPS has some latency attached to it, you will find it really interesting to compare GPS speed with actual wheelspeed data by overlaying them on the same graph.
Ok, thank you.
I wasn´t quite shure, but that explains it quite well :)
Some logging showing the lag in GPS versus Wheel Speed Sensors. As you can see, there is a considerable lag with the GPS speed, with the GPS Speed being around 0.4 seconds behind the wheel speed to reach the same speed.
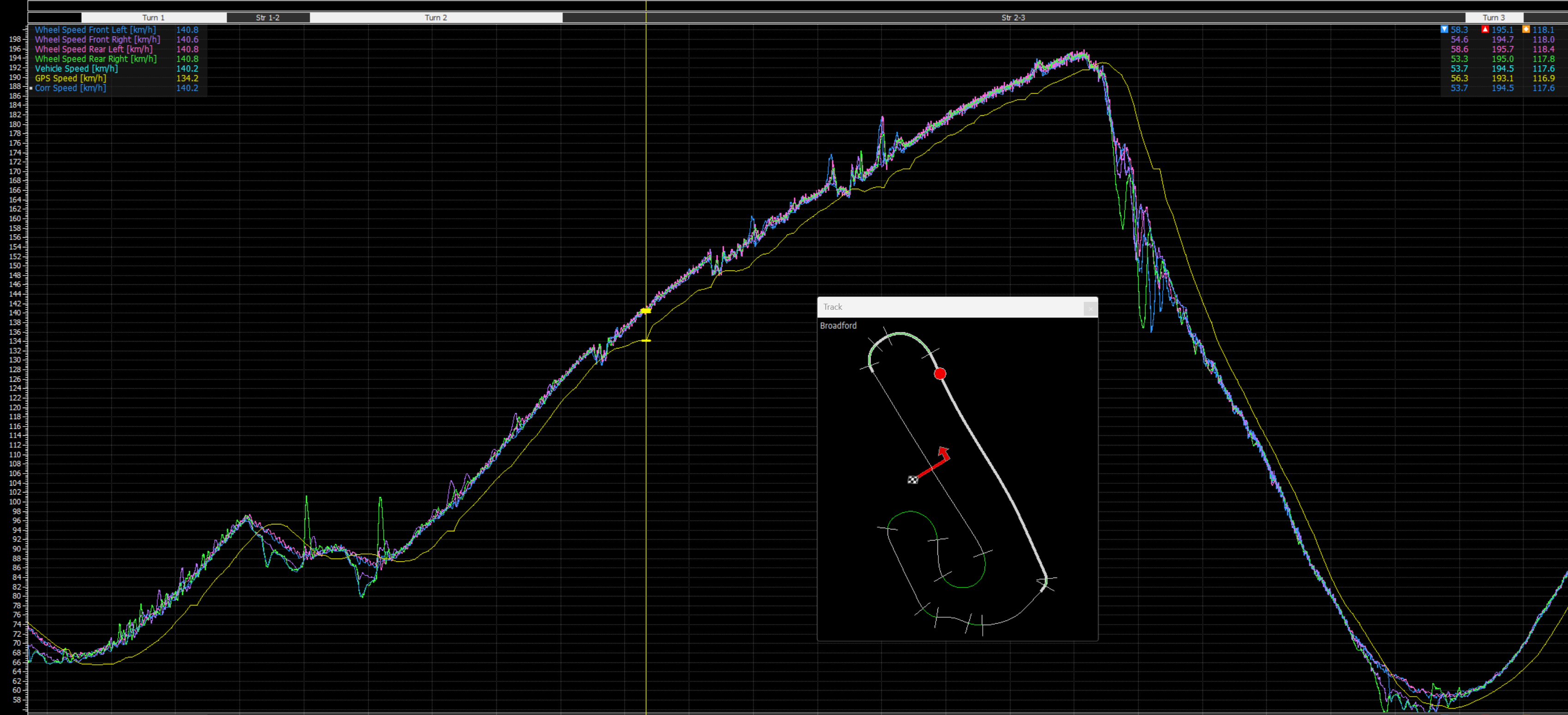 GPS Versus Wheel Speeds by Stephen Dean, on Flickr
GPS Versus Wheel Speeds by Stephen Dean, on Flickr







